Wzory fizyczne na ruch krzywoliniowy. Ruch ciała po zakrzywionej drodze. Ruch okrężny. Charakterystyka ruchu obrotowego. Przyspieszenie dośrodkowe
6. Ruch krzywoliniowy. Przemieszczenie kątowe, prędkość kątowa i przyspieszenie ciała. Tor i przemieszczenie podczas ruchu krzywoliniowego ciała.
Ruch krzywoliniowy– jest to ruch, którego trajektorią jest linia zakrzywiona (na przykład okrąg, elipsa, hiperbola, parabola). Przykładem ruchu krzywoliniowego jest ruch planet, koniec wskazówki zegara wzdłuż tarczy itp. Ogólnie prędkość krzywoliniowa zmiany wielkości i kierunku.
Ruch krzywoliniowy punktu materialnego uważa się za ruch jednostajny, jeśli moduł prędkość stały (na przykład ruch jednostajny po okręgu) i równomiernie przyspieszony, jeśli moduł i kierunek prędkość zmiany (na przykład ruch ciała rzuconego pod kątem do poziomu).
Ryż. 1.19. Trajektoria i wektor ruchu podczas ruchu krzywoliniowego.
Podczas poruszania się po zakrzywionej ścieżce wektor przemieszczenia skierowany wzdłuż cięciwy (ryc. 1.19) i l- długość trajektorie . Chwilowa prędkość ciała (czyli prędkość ciała w danym punkcie trajektorii) jest skierowana stycznie do punktu trajektorii, w którym aktualnie znajduje się poruszające się ciało (rys. 1.20).
 Ryż. 1,20. Prędkość chwilowa podczas ruchu zakrzywionego.
Ryż. 1,20. Prędkość chwilowa podczas ruchu zakrzywionego.
Ruch krzywoliniowy jest zawsze ruchem przyspieszonym. To jest przyspieszenie podczas ruchu zakrzywionego jest zawsze obecny, nawet jeśli moduł prędkości się nie zmienia, a jedynie zmienia się kierunek prędkości. Zmiana prędkości w jednostce czasu wynosi przyspieszenie styczne :
 Lub
Lub 
Gdzie w τ , w 0 – wartości prędkości w chwili czasu T 0 +Δt I T 0 odpowiednio.
Przyspieszenie styczne w danym punkcie trajektorii kierunek pokrywa się z kierunkiem prędkości ruchu ciała lub jest do niego przeciwny.
Normalne przyspieszenie jest zmianą prędkości w kierunku na jednostkę czasu:

Normalne przyspieszenie skierowany wzdłuż promienia krzywizny trajektorii (w kierunku osi obrotu). Przyspieszenie normalne jest prostopadłe do kierunku prędkości.
Przyspieszenie dośrodkowe jest normalnym przyspieszeniem podczas ruchu jednostajnego po okręgu.
Przyspieszenie całkowite podczas ruchu jednostajnego krzywoliniowego ciała równa się:

Ruch ciała po zakrzywionej ścieżce można w przybliżeniu przedstawić jako ruch po łukach niektórych okręgów (ryc. 1.21).
 Ryż. 1.21. Ruch ciała podczas ruchu krzywoliniowego.
Ryż. 1.21. Ruch ciała podczas ruchu krzywoliniowego.
Ruch krzywoliniowy
Ruchy krzywoliniowe– ruchy, których trajektorie nie są liniami prostymi, lecz liniami zakrzywionymi. Planety i wody rzek poruszają się po krzywoliniowych trajektoriach.
Ruch krzywoliniowy jest zawsze ruchem z przyspieszeniem, nawet jeśli wartość bezwzględna prędkości jest stała. Ruch krzywoliniowy ze stałym przyspieszeniem odbywa się zawsze w płaszczyźnie, w której znajdują się wektory przyspieszeń i prędkości początkowe punktu. W przypadku ruchu krzywoliniowego ze stałym przyspieszeniem w płaszczyźnie xOj projekcje w X I w y jego prędkość na osi Wół I Oj i współrzędne X I y punktów w dowolnym momencie T określone wzorami
![]()
![]()
Szczególnym przypadkiem ruchu krzywoliniowego jest ruch po okręgu. Ruch po okręgu, nawet jednostajny, jest zawsze ruchem przyspieszonym: moduł prędkości jest zawsze skierowany stycznie do trajektorii, ciągle zmieniając kierunek, więc ruch po okręgu zawsze występuje z przyspieszeniem dośrodkowym, gdzie R– promień okręgu.
Wektor przyspieszenia podczas poruszania się po okręgu jest skierowany do środka okręgu i prostopadle do wektora prędkości.
W ruchu krzywoliniowym przyspieszenie można przedstawić jako sumę składowych normalnych i stycznych:
Przyspieszenie normalne (dośrodkowe) jest skierowane w stronę środka krzywizny trajektorii i charakteryzuje zmianę prędkości w kierunku:
v – chwilowa wartość prędkości, R– promień krzywizny trajektorii w danym punkcie.
Przyspieszenie styczne (styczne) jest skierowane stycznie do trajektorii i charakteryzuje zmianę prędkości modulo.
Całkowite przyspieszenie, z jakim porusza się punkt materialny, jest równe:

Oprócz przyspieszenia dośrodkowego najważniejszymi cechami ruchu jednostajnego są okres i częstotliwość obrotu.
Okres obiegu- jest to czas, w którym organizm dokonuje jednego obrotu .
Okres jest oznaczony literą T(c) i jest określona wzorem:
Gdzie T- czas obiegu, P- liczba obrotów wykonanych w tym czasie.
Częstotliwość- jest to wielkość liczbowo równa liczbie obrotów wykonanych w jednostce czasu.
Częstotliwość jest oznaczona grecką literą (nu) i obliczana jest za pomocą wzoru:
Częstotliwość mierzona jest w 1/s.
Okres i częstotliwość są wielkościami wzajemnie odwrotnymi:
Jeśli ciało porusza się po okręgu z prędkością v, wykonuje jeden obrót, wówczas odległość przebytą przez to ciało można obliczyć, mnożąc prędkość w na czas jednej rewolucji:
l = vT. Z drugiej strony droga ta jest równa obwodowi koła 2π R. Dlatego
vT = 2π R,
![]()
Gdzie w(s-1) - prędkość kątowa.
Przy stałej częstotliwości obrotu przyspieszenie dośrodkowe jest wprost proporcjonalne do odległości poruszającej się cząstki od środka obrotu.
Prędkość kątowa (w) – wartość równa stosunkowi kąta obrotu promienia, w którym znajduje się punkt obrotu, do okresu czasu, w którym ten obrót nastąpił:
![]() .
.
Zależność między prędkościami liniowymi i kątowymi:
Ruch ciała można uznać za znany tylko wtedy, gdy wiadomo, w jaki sposób porusza się każdy punkt. Najprostszym ruchem ciał stałych jest ruch translacyjny. Progresywny zwany ruchem solidny, w którym każda linia prosta narysowana w tym ciele porusza się równolegle do siebie.
W zależności od kształtu trajektorii ruch można podzielić na prostoliniowy i krzywoliniowy. Najczęściej spotykasz ruchy krzywoliniowe, gdy trajektoria jest reprezentowana jako krzywa. Przykładem tego rodzaju ruchu jest droga ciała rzuconego pod kątem do horyzontu, ruch Ziemi wokół Słońca, planet i tak dalej.
Obrazek 1 . Trajektoria i ruch w ruchu zakrzywionym
Definicja 1Ruch krzywoliniowy nazywany ruchem, którego trajektoria jest linią zakrzywioną. Jeśli ciało porusza się po zakrzywionej drodze, to wektor przemieszczenia s → jest skierowany wzdłuż cięciwy, jak pokazano na rysunku 1, a l jest długością toru. Kierunek chwilowej prędkości ruchu ciała przebiega stycznie w tym samym punkcie trajektorii, w którym ten moment znajduje się poruszający się obiekt, jak pokazano na rysunku 2.

Rysunek 2. Prędkość chwilowa podczas ruchu zakrzywionego
Definicja 2
Ruch krzywoliniowy punktu materialnego nazywany jednostajnym, gdy moduł prędkości jest stały (ruch po okręgu) i równomiernie przyspieszanym, gdy zmienia się kierunek i moduł prędkości (ruch rzuconego ciała).
Ruch krzywoliniowy jest zawsze przyspieszony. Wyjaśnia to fakt, że nawet przy niezmienionym module prędkości i zmienionym kierunku przyspieszenie jest zawsze obecne.
Do badania ruchu krzywoliniowego punktu materialnego stosuje się dwie metody.
Ścieżka jest podzielona na osobne odcinki, na każdym z nich można ją uznać za prostą, jak pokazano na rysunku 3.
Rysunek 3. Podział ruchu krzywoliniowego na translacyjny
Teraz prawo ruchu prostoliniowego można zastosować do każdej sekcji. Ta zasada jest dozwolona.
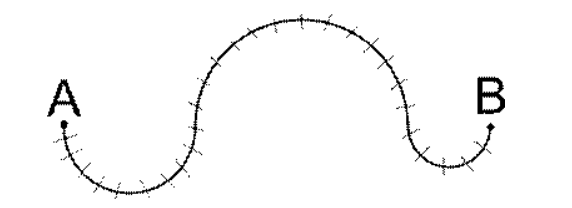
Za najwygodniejszą metodę rozwiązania uważa się przedstawienie ścieżki jako zestawu kilku ruchów po łukach kołowych, jak pokazano na rysunku 4. Liczba przegród będzie znacznie mniejsza niż w poprzedniej metodzie, ponadto ruch po okręgu jest już krzywoliniowy.

Rysunek 4. Podział ruchu krzywoliniowego na ruch po łukach kołowych
Notatka 1
Aby zarejestrować ruch krzywoliniowy, trzeba umieć opisać ruch po okręgu i przedstawić dowolny ruch w postaci zbiorów ruchów po łukach tych okręgów.
Badanie ruchu krzywoliniowego polega na zestawieniu równania kinematycznego opisującego ten ruch i pozwalającego na wyznaczenie wszystkich charakterystyk ruchu w oparciu o dostępne warunki początkowe.
Przykład 1
Biorąc pod uwagę punkt materialny poruszający się wzdłuż krzywej, jak pokazano na rysunku 4. Środki okręgów O 1, O 2, O 3 znajdują się na tej samej linii prostej. Trzeba znaleźć przemieszczenie
s → i długość ścieżki l podczas przemieszczania się z punktu A do B.
Rozwiązanie
Pod warunkiem mamy, że środki okręgu należą do tej samej prostej, stąd:
s → = R 1 + 2 R 2 + R 3 .
Ponieważ trajektoria ruchu jest sumą półokręgów, to:
l ~ ZA b = π R 1 + R 2 + R 3 .
Odpowiedź: s → = R 1 + 2 R 2 + R 3, l ~ A B = π R 1 + R 2 + R 3.
Przykład 2
Podana jest zależność drogi przebytej przez ciało od czasu, wyrażona równaniem s (t) = A + B t + C t 2 + D t 3 (C = 0,1 m / s 2, D = 0,003 m / s 3). Oblicz, po jakim czasie od rozpoczęcia ruchu przyspieszenie ciała będzie równe 2 m/s 2
Rozwiązanie

Odpowiedź: t = 60 s.
Jeśli zauważysz błąd w tekście, zaznacz go i naciśnij Ctrl+Enter
W tym temacie będzie więcej złożony widok ruchy – KRZYWOLINIJNY. Jak można się domyślić, krzywoliniowy to ruch, którego trajektoria jest linią zakrzywioną. A ponieważ ruch ten jest bardziej złożony niż ruch prostoliniowy, wielkości fizyczne wymienione w poprzednim rozdziale nie wystarczą już do jego opisania.
Do matematycznego opisu ruchu krzywoliniowego wyróżnia się 2 grupy wielkości: liniową i kątową.
Wielkości liniowe.
1. Poruszający. W sekcji 1.1 nie wyjaśniliśmy różnicy między tym pojęciem
 Rys. 1.3 ścieżka (odległość) i koncepcja ruchu,
Rys. 1.3 ścieżka (odległość) i koncepcja ruchu,
ponieważ w prosty ruch te
różnice nie odgrywają zasadniczej roli, oraz
Ilości te oznaczone są tą samą literą -
wycie S. Ale gdy mamy do czynienia z ruchem krzywoliniowym,
tę kwestię należy wyjaśnić. Jaka jest więc ścieżka
(lub odległość)? – To jest długość trajektorii
ruchy. To znaczy, jeśli śledzisz trajektorię
ruch ciała i zmierz go (w metrach, kilometrach itp.), otrzymasz wartość zwaną ścieżką (lub odległością) S(patrz ryc. 1.3). Zatem ścieżka jest wielkością skalarną, którą można scharakteryzować jedynie liczbą.
 Ryc. 1.4 A ruch to najkrótsza odległość pomiędzy
Ryc. 1.4 A ruch to najkrótsza odległość pomiędzy
punkt początkowy ścieżki i punkt końcowy ścieżki. A ponieważ
ruch od początku ma ścisły kierunek
ścieżka do końca, to jest to wielkość wektorowa
i charakteryzuje się nie tylko wartością liczbową, ale także
kierunku (ryc. 1.3). Nie trudno zgadnąć, co by było, gdyby
ciało porusza się po zamkniętej trajektorii, a następnie do
w chwili powrotu do pozycji wyjściowej przemieszczenie będzie wynosić zero (patrz rys. 1.4).
2 . Prędkość liniowa. W rozdziale 1.1 podaliśmy definicję tej wielkości i pozostaje ona aktualna, chociaż nie określiliśmy wówczas, że prędkość ta jest liniowa. Jaki jest kierunek wektora prędkości liniowej? Przejdźmy do ryc. 1.5. Tutaj pokazano fragment

krzywoliniowy tor ciała. Każda zakrzywiona linia jest połączeniem łuków różnych okręgów. Rysunek 1.5 pokazuje tylko dwa z nich: okrąg (O 1, r 1) i okrąg (O 2, r 2). W chwili, gdy ciało przechodzi po łuku danego okręgu, jego środek staje się tymczasowym środkiem obrotu o promieniu równym promieniowi tego okręgu.
Wektor poprowadzony od środka obrotu do punktu, w którym aktualnie znajduje się ciało, nazywany jest wektorem promienia. Na ryc. 1.5 wektory promieni są reprezentowane przez wektory i . Na rysunku tym przedstawiono także wektory prędkości liniowej: wektor prędkości liniowej jest zawsze skierowany stycznie do trajektorii w kierunku ruchu. W związku z tym kąt między wektorem a wektorem promienia poprowadzonym do danego punktu na trajektorii jest zawsze równy 90°. Jeśli ciało porusza się ze stałą prędkością liniową, to wielkość wektora nie ulegnie zmianie, natomiast jego kierunek zmienia się cały czas w zależności od kształtu trajektorii. W przypadku pokazanym na rys. 1.5 ruch odbywa się ze zmienną prędkością liniową, w związku z czym zmienia się moduł wektora. Ponieważ jednak podczas ruchu krzywoliniowego kierunek wektora zawsze się zmienia, wynika z tego bardzo ważny wniosek:
w ruchu krzywoliniowym zawsze występuje przyspieszenie! (Nawet jeżeli ruch odbywa się ze stałą prędkością liniową.) Ponadto przyspieszenie, o którym mowa w ust w tym przypadku, w dalszej części będziemy nazywać przyspieszeniem liniowym.
3 . Przyspieszenie liniowe. Przypomnę, że przyspieszenie następuje, gdy zmienia się prędkość. W związku z tym przyspieszenie liniowe pojawia się, gdy zmienia się prędkość liniowa. Prędkość liniowa podczas ruchu krzywoliniowego może zmieniać się zarówno pod względem wielkości, jak i kierunku. Zatem całkowite przyspieszenie liniowe rozkłada się na dwie składowe, z których jedna wpływa na kierunek wektora, a druga na jego wielkość. Rozważmy te przyspieszenia (ryc. 1.6). Na tym zdjęciu
 Ryż. 1.6
Ryż. 1.6
O
przedstawia ciało poruszające się po torze kołowym, którego środek obrotu znajduje się w punkcie O.
Nazywa się przyspieszenie zmieniające kierunek wektora normalna i jest wyznaczony. Nazywa się to normalnym, ponieważ jest skierowany prostopadle (normalnie) do stycznej, tj. wzdłuż promienia do środka zakrętu . Nazywa się to również przyspieszeniem dośrodkowym.
Nazywa się przyspieszenie zmieniające wielkość wektora styczny i jest wyznaczony. Leży na stycznej i może być skierowany albo w kierunku wektora, albo przeciwnie do niego :
Jeśli prędkość liniowa wzrasta, to > 0 i ich wektory są współkierunkowe;
Jeśli prędkość liniowa wtedy maleje< 0 и их вектора противоположно
skierowany.
Zatem te dwa przyspieszenia zawsze tworzą ze sobą kąt prosty (90°) i są składnikami całkowitego przyspieszenia liniowego, tj. Całkowite przyspieszenie liniowe jest sumą wektorów przyspieszenia normalnego i stycznego:
Zaznaczam, że w tym przypadku mówimy o konkretnie o sumie wektorowej, ale w żadnym wypadku o sumie skalarnej. Aby znaleźć wartość liczbową , wiedząc i , należy skorzystać z twierdzenia Pitagorasa (kwadrat przeciwprostokątnej trójkąta jest liczbowo równy sumie kwadratów przyprostokątnych tego trójkąta):
![]() (1.8).
(1.8).
Oznacza to:
![]()
![]()
![]() (1.9).
(1.9).
Zastanowimy się, jakie wzory obliczyć, korzystając z nieco później.
WARTOŚCI KĄTOWE.
1 . Kąt obrotu φ . Podczas ruchu krzywoliniowego ciało nie tylko porusza się w pewnym kierunku i wykonuje pewien ruch, ale także obraca się o określony kąt (patrz ryc. 1.7 (a)). Dlatego do opisania takiego ruchu wprowadza się wielkość zwaną kątem obrotu, oznaczoną grecką literą φ (czytaj „fi”) W układzie SI kąt obrotu mierzony jest w radianach (symbol „rad”). Przypomnę, że jeden pełny obrót równa się 2π radianów, a liczba π jest stała: π ≈ 3,14. na ryc. Rysunek 1.7(a) przedstawia trajektorię ciała po okręgu o promieniu R ze środkiem w punkcie O. Sam kąt obrotu jest kątem pomiędzy wektorami promieni ciała w niektórych chwilach czasu.
2 . Prędkość kątowa ω – jest to wielkość pokazująca, jak zmienia się kąt obrotu w jednostce czasu. (ω - Grecka litera, czytaj „omega”.) Na ryc. 1.7(b) pokazuje położenie punktu materialnego poruszającego się po torze kołowym ze środkiem w punkcie O, w odstępach czasu Δt . Jeżeli kąty, o jakie ciało obraca się w tych odstępach czasu, są takie same, to prędkość kątowa jest stała i ruch ten można uznać za równomierny. A jeśli kąty obrotu są różne, wówczas ruch jest nierówny. A ponieważ prędkość kątowa pokazuje, ile radianów
ciało obracało się w ciągu jednej sekundy, wówczas jednostką miary są radiany na sekundę
(oznaczony przez " rad/s »).
 Ryż. 1.7
Ryż. 1.7
A). B). Δt
Δt
Δt
O φ O Δt
3 . Przyspieszenie kątowe ε jest wielkością pokazującą, jak zmienia się ona w jednostce czasu. A od przyspieszenia kątowego ε pojawia się, gdy zmienia się prędkość kątowa ω , to możemy stwierdzić, że przyspieszenie kątowe występuje tylko w przypadku nierównomiernego ruchu krzywoliniowego. Jednostką miary przyspieszenia kątowego jest „ rad/s 2 » (radiany na sekundę do kwadratu).
Tym samym tabelę 1.1 można uzupełnić o trzy kolejne wartości:
Tabela 1.2
| № | wielkość fizyczna | określenie ilości | oznaczenie ilości | jednostka |
| 1. | ścieżka | to droga przebyta przez ciało podczas jego ruchu | S | m (metr) |
| 2. | prędkość | jest to odległość, jaką przebywa ciało w jednostce czasu (na przykład 1 sekunda) | υ | m/s (metr na sekundę) |
| 3. | przyśpieszenie | jest wielkością, o jaką zmienia się prędkość ciała w jednostce czasu | A | m/s 2 (metr na sekundę do kwadratu) |
| 4. | czas | T | s (drugi) | |
| 5. | kąt obrotu | jest to kąt, o jaki obraca się ciało podczas ruchu krzywoliniowego | φ | rad (radiany) |
| 6. | prędkość kątowa | jest to kąt, o jaki ciało obraca się w jednostce czasu (na przykład w ciągu 1 sekundy) | ω | rad/s (radiany na sekundę) |
| 7. | przyspieszenie kątowe | jest to wielkość, o jaką zmienia się prędkość kątowa w jednostce czasu | ε | rad/s 2 (radany na sekundę do kwadratu) |
Teraz możemy przejść bezpośrednio do rozważenia wszystkich rodzajów ruchu krzywoliniowego, a są tylko trzy z nich.
Kinematyka bada ruch bez identyfikowania przyczyn powodujących ten ruch. Kinematyka jest gałęzią mechaniki. Głównym zadaniem kinematyki jest matematyczne wyznaczanie położenia i charakterystyk ruchu punktów lub ciał w czasie.
Podstawowe wielkości kinematyczne:
- Przenosić() - wektor łączący punkt początkowy i końcowy.
r – wektor promienia, określa położenie MT w przestrzeni.
- Prędkość– stosunek drogi do czasu .
- Ścieżka- zbiór punktów, przez które przeszło ciało.
- Przyspieszenie – szybkość zmiany prędkości, czyli pierwsza pochodna prędkości.
2. Przyspieszenie w ruchu zakrzywionym: przyspieszenie normalne i styczne. Płaski obrót. Prędkość kątowa, przyspieszenie.
Ruch krzywoliniowy to ruch, którego trajektoria jest linią zakrzywioną. Przykładem ruchu krzywoliniowego jest ruch planet, koniec wskazówki zegara wzdłuż tarczy itp.
Ruch krzywoliniowy– jest to zawsze ruch przyspieszony. Oznacza to, że przyspieszenie podczas ruchu krzywoliniowego występuje zawsze, nawet jeśli moduł prędkości nie zmienia się, a zmienia się tylko kierunek prędkości.
Zmiana prędkości w jednostce czasu – jest to przyspieszenie styczne:
Gdzie 𝛖 τ , 𝛖 0 to odpowiednio wartości prędkości w czasie t 0 + Δt i t 0. Przyspieszenie styczne w danym punkcie trajektorii kierunek pokrywa się z kierunkiem prędkości ruchu ciała lub jest do niego przeciwny.
Normalne przyspieszenie jest zmianą prędkości w kierunku na jednostkę czasu:
![]()
Normalne przyspieszenie skierowany wzdłuż promienia krzywizny trajektorii (w kierunku osi obrotu). Przyspieszenie normalne jest prostopadłe do kierunku prędkości.
Pełne przyspieszenie przy jednostajnie zmiennym ruchu krzywoliniowym ciała wynosi:
-prędkość kątowa pokazuje kąt, o jaki punkt obraca się podczas ruchu jednostajnego po okręgu w jednostce czasu. Jednostką SI jest rad/s.
Płaski obrót jest obrotem wszystkich wektorów prędkości punktów ciała w jednej płaszczyźnie.
3. Zależność wektorów prędkości od prędkości kątowej punktu materialnego. Przyspieszenie normalne, styczne i pełne.
Przyspieszenie styczne (styczne).– jest to składowa wektora przyspieszenia skierowana wzdłuż stycznej do trajektorii w danym punkcie trajektorii ruchu. Przyspieszenie styczne charakteryzuje zmianę prędkości modulo podczas ruchu krzywoliniowego.
Przyspieszenie normalne (dośrodkowe). jest składową wektora przyspieszenia skierowaną wzdłuż normalnej do trajektorii ruchu w danym punkcie trajektorii ciała. Oznacza to, że normalny wektor przyspieszenia jest prostopadły do liniowej prędkości ruchu (patrz ryc. 1.10). Przyspieszenie normalne charakteryzuje zmianę prędkości w kierunku i jest oznaczone literą n. Wektor przyspieszenia normalnego jest skierowany wzdłuż promienia krzywizny trajektorii.
Pełne przyspieszenie w ruchu krzywoliniowym składa się z przyspieszeń stycznych i normalnych zgodnie z zasadą dodawania wektorów i jest określony wzorem.
Ruch krzywoliniowy równomiernie przyspieszony
Ruchy krzywoliniowe to ruchy, których trajektorie nie są proste, ale linie zakrzywione. Planety i wody rzek poruszają się po krzywoliniowych trajektoriach.
Ruch krzywoliniowy jest zawsze ruchem z przyspieszeniem, nawet jeśli wartość bezwzględna prędkości jest stała. Ruch krzywoliniowy ze stałym przyspieszeniem odbywa się zawsze w płaszczyźnie, w której znajdują się wektory przyspieszeń i prędkości początkowe punktu. W przypadku ruchu krzywoliniowego ze stałym przyspieszeniem w płaszczyźnie xOy rzuty vx i vy jego prędkości na osie Ox i Oy oraz współrzędne x i y punktu w dowolnej chwili t wyznaczają wzory
Nierówny ruch. Ostra prędkość
Żadne ciało nie porusza się ze stałą prędkością przez cały czas. Kiedy samochód zaczyna się poruszać, porusza się coraz szybciej. Przez chwilę może poruszać się równomiernie, ale potem zwalnia i zatrzymuje się. W tym przypadku samochód pokonuje różne odległości w tym samym czasie.
Ruch, podczas którego ciało pokonuje różne długości torów w równych odstępach czasu, nazywa się nierównym. Przy takim ruchu prędkość nie pozostaje niezmieniona. W tym przypadku możemy mówić jedynie o prędkości średniej.
Prędkość średnia pokazuje odległość, jaką przebywa ciało w jednostce czasu. Jest równy stosunkowi przemieszczenia ciała do czasu ruchu. Prędkość średnią, podobnie jak prędkość ciała w ruchu jednostajnym, mierzy się w metrach podzielonych przez sekundę. Aby dokładniej scharakteryzować ruch, w fizyce wykorzystuje się prędkość chwilową.
Prędkość ciała w danym momencie lub w danym punkcie trajektorii nazywa się prędkością chwilową. Prędkość chwilowa jest wielkością wektorową i jest skierowana w taki sam sposób, jak wektor przemieszczenia. Prędkość chwilową można zmierzyć za pomocą prędkościomierza. W systemie międzynarodowym prędkość chwilową mierzy się w metrach podzielonych przez sekundę.
prędkość ruchu punktu jest nierówna
Ruch ciała po okręgu
Ruch krzywoliniowy jest bardzo powszechny w przyrodzie i technologii. Jest bardziej złożona niż linia prosta, ponieważ istnieje wiele zakrzywionych trajektorii; ruch ten jest zawsze przyspieszany, nawet jeśli moduł prędkości się nie zmienia.
Jednak ruch po dowolnej zakrzywionej ścieżce można w przybliżeniu przedstawić jako ruch po łukach koła.
Kiedy ciało porusza się po okręgu, kierunek wektora prędkości zmienia się z punktu na punkt. Dlatego też, gdy mówią o prędkości takiego ruchu, mają na myśli prędkość chwilową. Wektor prędkości jest skierowany stycznie do okręgu, a wektor przemieszczenia wzdłuż cięciw.
Ruch jednostajny po okręgu to ruch, podczas którego nie zmienia się moduł prędkości ruchu, zmienia się jedynie jej kierunek. Przyspieszenie takiego ruchu jest zawsze skierowane do środka okręgu i nazywa się dośrodkowym. Aby obliczyć przyspieszenie ciała poruszającego się po okręgu, należy podzielić kwadrat prędkości przez promień okręgu.
Oprócz przyspieszenia ruch ciała po okręgu charakteryzuje się następującymi wielkościami:
Okres obrotu ciała to czas, w którym ciało wykonuje jeden pełny obrót. Okres obrotu jest oznaczony literą T i mierzony w sekundach.
Częstotliwość obrotu ciała to liczba obrotów w jednostce czasu. Czy prędkość obrotowa jest oznaczona literą? i jest mierzona w hercach. Aby znaleźć częstotliwość, należy podzielić ją przez okres.
Prędkość liniowa to stosunek ruchu ciała do czasu. Aby wyznaczyć prędkość liniową ciała po okręgu, należy podzielić obwód przez okres (obwód wynosi 2Ω pomnożony przez promień).
Prędkość kątowa jest wielkością fizyczną równą stosunkowi kąta obrotu promienia okręgu, po którym porusza się ciało, do czasu ruchu. Prędkość kątowa jest oznaczona literą? i jest mierzona w radianach podzielonych na sekundę. Znajdować prędkość kątowa czy można to zrobić dzieląc 2? na okres. Prędkość kątowa i prędkość liniowa między sobą. Aby znaleźć prędkość liniową, należy pomnożyć prędkość kątową przez promień okręgu.

Rysunek 6. Ruch po okręgu, wzory.









- Sałatka z paluszków krabowych z kukurydzą, serem i jajkiem Sałatka krabowa z twardym serem
- Ziemniaki z mięsem mielonym w piekarniku w folii
- Kotlety w folii w piekarniku
- Mięso mielone w folii w piekarniku z nadzieniem
- Kasza perłowa pęczak z wołowiną
- Przepisy na pieczone jabłka z twarogiem, rodzynkami, miodem, orzechami i cynamonem
- Z ziemniaków można uzyskać lepsze rezultaty
- Ciasto francuskie nadziewane duszoną kapustą
- Przepis: Biszkopt „Jabłko” – „w piekarniku”
- Serca z kurczaka w sosie śmietanowym
- Jak gotować bekon i jajka
- Jak zmienić zamówienie odbioru gotówki w 1c
- Kalkulacja kary według stopy refinansowania, kara online
- Pozostałe aktywa obrotowe w bilansie to... Rachunki i inne aktywa
- Procedura składania kalkulacji składek ubezpieczeniowych Kalkulacja RSV za 9 miesięcy
- Jak obniżyć VAT i utrzymać zyski
- Międzynarodowe standardy rachunkowości i raportowania
- Jak prawidłowo wypełnić zeznanie podatkowe
- Sałatka krabowa z serem – pięć najlepszych przepisów
- Kotlety w folii w piekarniku